You are viewing a plain text version of this content. The canonical link for it is here.
Posted to commits@tvm.apache.org by GitBox <gi...@apache.org> on 2022/05/20 00:21:49 UTC
[GitHub] [tvm] Kevin-XiongC opened a new issue, #11383: [Bug] Numerical inconsistency for roi_align in Relay
Kevin-XiongC opened a new issue, #11383:
URL: https://github.com/apache/tvm/issues/11383
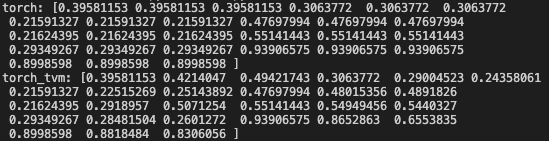
I am converting roi_align from Paddle as frontend. However, I encountered the numerical issue the same as PyTorch's like below
I wonder whether I missed something or this should be a bug in fact.
### Expected behavior
The results of each entry should be numerically close between the compiled model and Pytorch version.
### Actual behavior
Some results's differences are greater than 0.1
### Environment
Ubuntu20.04, tvm 0.9dev, python3.8,llvm 13
### Steps to reproduce
``` python
import warnings
warnings.filterwarnings('ignore')
import os
import unittest
import numpy as np
import tvm
from tvm import relay
from tvm.contrib import graph_executor
from collections import OrderedDict
import sys
import torch
import torchvision
N = 1
C = 3
H = 3
W = 3
num = 1
aligned = True
target = tvm.target.Target("llvm")
np.random.seed(1)
dev = tvm.cpu(0)
data = np.random.rand(1, C, H, W)
a, b = np.random.rand(num, 1), np.random.rand(num, 1)
x_min = np.minimum(a, b)*H
x_max = np.maximum(a, b)*H
a, b = np.random.rand(num, 1), np.random.rand(num, 1)
y_min = np.minimum(a, b)*W
y_max = np.maximum(a, b)*W
boxes = np.concatenate([x_min, y_min, x_max, y_max], axis=1)
x = np.pad(boxes, pad_width=((0, 0), (1, 0)), mode='constant')
m = torchvision.ops.RoIAlign(
output_size=3, spatial_scale=1, sampling_ratio=-1, aligned=aligned)
res_torch = m.forward(
torch.Tensor(data), torch.Tensor(x))
print("torch:", res_torch.numpy().ravel())
scripted_model = torch.jit.trace(m, example_inputs=[torch.Tensor(data), torch.Tensor(
x)]).eval()
torch_mod, torch_params = relay.frontend.from_pytorch(
scripted_model, [('input', data.shape), ('rois', x.shape)])
with tvm.transform.PassContext(opt_level=3):
lib = relay.build(torch_mod, target=target, params=torch_params)
gen_module = graph_executor.GraphModule(lib['default'](dev))
map_inputs = {"input": data, "rois": x}
gen_module.set_input(**map_inputs)
gen_module.run()
res_torch_tvm = gen_module.get_output(0).numpy()
print("torch_tvm:", res_torch_tvm.ravel())
--
This is an automated message from the Apache Git Service.
To respond to the message, please log on to GitHub and use the
URL above to go to the specific comment.
To unsubscribe, e-mail: commits-unsubscribe@tvm.apache.org.apache.org
For queries about this service, please contact Infrastructure at:
users@infra.apache.org